|
|
|

|
您現在的位置:首頁
> 產品中心 > 詳細內容 |
|

|
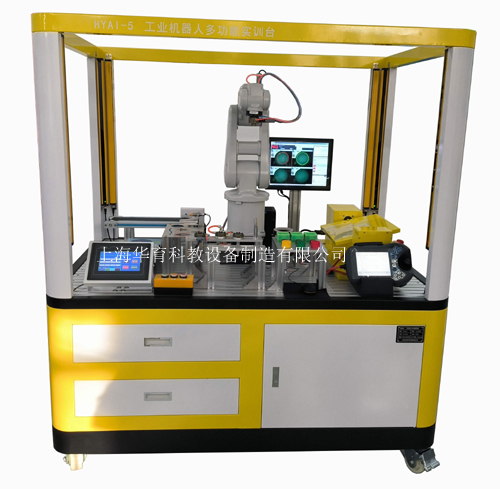
HYAI-2B型工業機器人多功能綜合應用實訓裝置
一、設備主要參數
1.輸入電源:單相三線 AC220V±10%;
2.工作環境:溫度-5oC~+40oC;濕度 85%(25oC);海拔<4000m;
3.氣源壓力:0.4~0.6MPa。
4.裝置容量:<1kVA;
5.外形尺寸:1650mm×1200mm×1500mm;
6.安全保護:具有接地、漏電壓、漏電流保護,安全指標符合國家標準。
二、設備功能結構參數
實訓裝置可以各個模塊獨立運行,能實現機器人單機練習實訓,又可以進行聯機運行,組成一套自動化運行系統,完成上料、輸送、搬運、壓鑄、碼垛等流程。
實訓裝置為模塊化開放式設計結構,不僅可作為獨立的系統單獨使用,也可以作為子系統與其它類似設備組合。模塊之間可以更換,方便二次開發。
實訓桌用鋁型材和鋼板焊接組成,桌面特有的 T 型槽,方便機械部件和電器元件的拆卸安裝,實訓桌的桌腳裝有帶剎車滾輪,便于裝置移動位置。
實訓桌的電氣安裝板采用改進型“橫二豎六”橢圓長孔加工,整體設計規范、合理,使各類元器件在任何角度、任何方位都能輕松裝配、調整。電氣安裝板可以向外抽出,方便電路布局和安裝調試。
實訓裝置擴展性強,所有模塊均可自由安裝和變換,根據需要可不斷進行升級,不需花太大代價。
三、設備組成及功能參數
六自由度機器人工作站由機器人本體、機器人控制器、示教盒、組成。機器人本體通過配備多功能氣爪(平行機械爪、吸盤)完成物件的抓取、放置、軌跡模擬畫圖、碼垛等操作。
1、工業機器人本體參數
機器人本體由六自由度關節組成,抓取物體重量≤3kg。固定在型材實訓桌上,活動范圍半徑580mm,角度 3302、
2、機器人控制器參數
它的運動控制技術、TrueMove和QuickMove是精度、速度、周期時間、可編程性以及與外部設備同步性等機器人性能指標的重要保證,支持DeviceNet、PROFIBUS DP、PROFINET、EtherNet/IP、Allen-Bradley總線協議,可應用于各種控制系統中。
3、機器人示教器參數
彩色、觸摸屏設計(中、英文互換);
三維操縱桿使用簡易、方便、快捷;
仿Windows操作界面,會使用電腦的您,同樣能輕易掌握操作;
和機器人本體配套,示教盒控制電路的主要功能是對操作鍵進行掃描并將按鍵信息送至控制器,同時將控制器產生的各種信息在顯示屏上進行顯示。
4、搬運工作站參數
主要由供料機構、傳輸機構、裝配平臺、暫存盒及工件等組成。
供料機構由井式料倉、料臺、方形工件、雙聯氣缸、檢測傳感器等組成。主要完成工件的自動上料。
傳輸機構主要由直流減速電機、工業皮帶、定位傳感器、皮帶滾輪、型材支架等組成,用于傳輸工件。
裝配平臺即可作為裝配平臺,也可以作為碼垛實訓平臺,亦可用做原材料堆放平臺,根據實訓的需要用于不同的功能。主要由工業型材及鋁材質平臺組成。
暫存盒主要由鋁合金材質加工而成,用與工件的暫存。
工件尼龍材質,用于搬運、碼垛、壓鑄訓練。
工作站利用機器人在流水線上拾取工件,將其搬運至容器內。
5、碼垛工作站參數
主要由供料機構、傳輸機構、碼垛平臺、工件等組成。
供料機構由井式料倉、料臺、方形工件、雙聯氣缸、檢測傳感器等組成。主要完成工件的自動上料。
傳輸機構主要由直流減速電機、工業皮帶、定位傳感器、皮帶滾輪、型材支架等組成,用于傳輸工件。
碼垛平臺即可作為碼垛平臺,也可以作為裝配實訓平臺,亦可用做原材料堆放平臺,根據實訓的需要用于不同的功能。主要由工業型材及鋁合金材質平臺組成。
工件分采用尼龍材質,用于搬運、碼垛、壓鑄訓練。
工作站主要實現模擬紙箱碼垛功能,機器人將模擬紙箱從傳送線上搬運至碼垛平臺,通過對機器人示教編程,可以進行多組合碼垛排列方式;
6、模擬焊接及軌跡繪制工作站參數
主要由校點錐軸、軌跡模擬板、畫板、支架、畫筆工裝等組成。
工作站模擬焊接方式來實現機器人的焊接功能;
7、壓鑄工作站參數要求
主要由模擬壓鑄機和檢測冷卻臺組成。
模擬壓鑄機主要由雙軸氣缸(氣缸行程100mm)、單軸氣缸(氣缸行程320mm)、磁感應器、電磁閥,導向直線滑軌組成。實現對工件的模擬壓鑄成型。
檢測冷卻臺主要由檢測傳感器、型材支架組成,實現壓鑄件的冷卻和檢測。
工作站模擬機器人壓鑄取件為例,機器人從壓鑄機將壓鑄完成的工件取出進行安好性檢查,然后放置在平臺上進行冷卻。
8、打磨拋光工作站參數要求
主要由拋光機構、打磨拋光工裝等組成。實現機器人通過與之配套的手爪實現在該單元的模擬打磨拋光。
被拋光工件采用不銹鋼。固定臺主體采用鋁型材制作。
打磨拋光工裝由母體工裝和打磨拋光工裝組成。通過直流電機驅動毛氈拋光輪對工件表面進行模擬拋光。
9、工裝工作站參數
主要由型材支架、鋁合金支架裝而成,工裝工作站可以容納4種工裝。工裝包括校點工裝、畫筆工裝、真空吸盤工裝、打磨拋光工裝。母體工裝可以自動抓取其余的4個工裝完成相應的動作功能,在抓取真空工裝時,氣路能夠自動對接,抓取打磨拋光工裝時,電路能夠自動對接。
10、電氣控制系統參數
電氣控制系統主要由可移動網孔板、漏電保護器、開關電源、可編程控制器、按鈕模塊、線槽、電線、接線端子等組成。具有接地保護、斷電保護、漏電保護功能,安全性符合相關的國標標準。安裝電氣的網孔板采用改進型“橫二豎六”橢圓長孔加工,整體設計規范、合理,使各類元器件在任何角度、任何方位都能輕松裝配、調整,采用抽屜式設計,可以抽出,方便接線。
11、工業機器人工作臺參數
工作臺主體部分采用型材搭建而成,帶有萬向腳輪,方便移動和固定。單個工作臺外形大體尺寸為:1650mm×1200×800mm(L×W×H)。
臺面采用工業標準20×80鋁型材,經加固處理,用于安裝工業機器人及其他實訓模塊。在型材中放置有多種螺母,各模塊均可自由調整位置。
工作臺下方設置有抽屜式網孔板,用于安裝電氣控制元件,網孔板采用改進型“橫二豎六”橢圓長孔加工,整體設計規范、合理,使各類元器件在任何角度、任何方位都能輕松裝配、調整。
四、實訓項目
1、工業機器人本體工作站(含控制柜和示教器)
2、工業機器人認知及示教設計;
3、工業機器人運動學分析及控制;
4、運動控制系統及C語言編程控制;
5、工業機器人基本指令操作與位置點設置;
6、工業機器人示教單元使用;
7、基本編程指令練習;
8、數據傳輸功能實驗;
9、定時、計數、移位功能實驗;
10、比較功能實驗;
11、跳轉功能的應用實驗;
12、子程序調用功能的應用實驗;
13、中斷控制功能的應用實驗;
14、PLC程序編程與調試;
15、電氣回路的安裝及調試;
16、組態監控軟件的基本應用;
17、組態監控軟件通信應用;
18、觸摸屏的編程與應用。
19、氣動控制回路的安裝及調試;
20、電控氣動閥的工作原理及應用;
21、真空發生器的工作原理及應用;
22、氣源組件的工作原理及應用;
23、氣缸的工作原理及應用。
24、搬運工作站搬運常用I/O配置;
25、掌握程序數據創建;
26、掌握目標點示教;
27掌握搬運程序編寫。
28、掌握碼垛常用I/O配置;
29、掌握中斷程序的運用;
30、掌握準確觸發動作的運用;
31、掌握碼垛節拍優化技巧。
32、模擬焊接工作站
33、掌握弧焊常用I/O配置;
34、掌握弧焊常用參數配置;
35、掌握弧焊軟件設定;
36、掌握弧焊程序數據創建;
37、掌握弧焊程序調試;
38、掌握Torch Services應用。
39、掌握壓鑄取件I/O配置;
40、掌握壓鑄取件常用指令;
41、掌握WordZone功能;
42、掌握SofdAct功能;
43、掌握壓鑄取件程序編寫與調試
五、設備主要配置參數要求
詳細備索
|
|
|
| |
|
|